In colonoscopy, a camera is inserted through the colon, a long tubular organ, in order to screen the internal tissue for cancer and other medical problems. However, inspection quality varies greatly with, even under optimal conditions, on average only 81% of the colon being inspected. A key cause for this is acute bends in the colon which can create blindspots. This is because the outsides of these bends are readily visible to the camera, but the colonoscope must be deliberately reinserted and hooked around the bend to view the insides.
We present a method for detecting blindspots at acute bends during a colonoscopy and alerting the clinician in real time, encouraging them to immediately revisit poorly inspected areas. We achieve this without a highly detailed 3D reconstruction of the colon, instead approximating local areas of the colon as a simple ‘curved tube’. As the endoscope is flexible, it conforms to the shape of the colon. Hence, by measuring the shape of the endoscope we can determine the curvature of the colon and, hence, of the curved model. The model can be used to detect tissue which is blocked from view due to an acute bend, tissue which is too far from the camera to be adequately inspected, and tissue which the camera was simply never directed at. Looking at many frames over a procedure, we can form a 2D panoramic map of the internal tissue which has been inspected, showing the clinician any areas which they have missed.
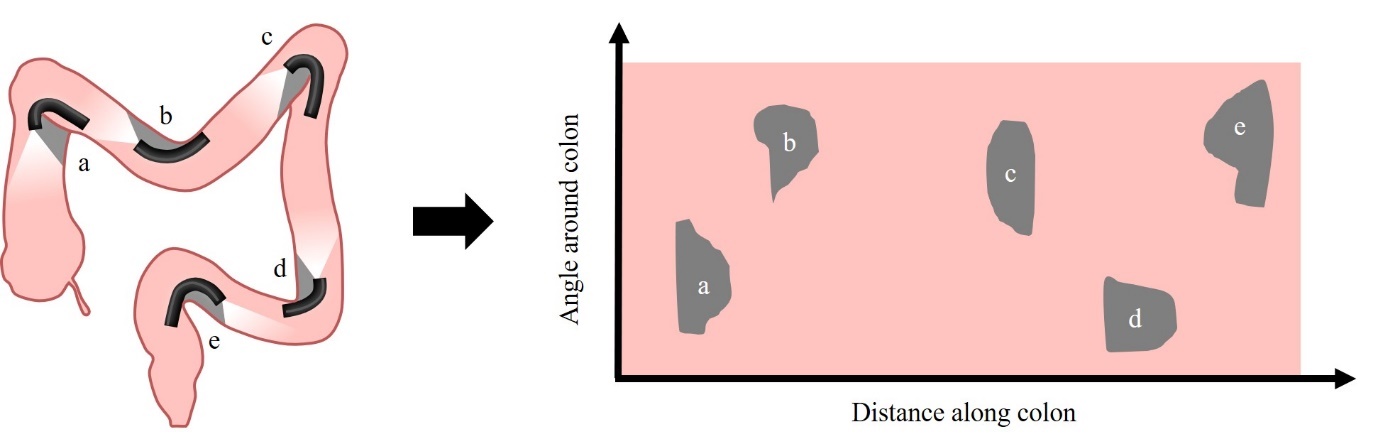
Figure 1. (Left) Many of the most common blind spots are located at acute bends in the colon. (Right) We produce a panoramic view of the tissue seen, indicating the location of these blind spots in real time.
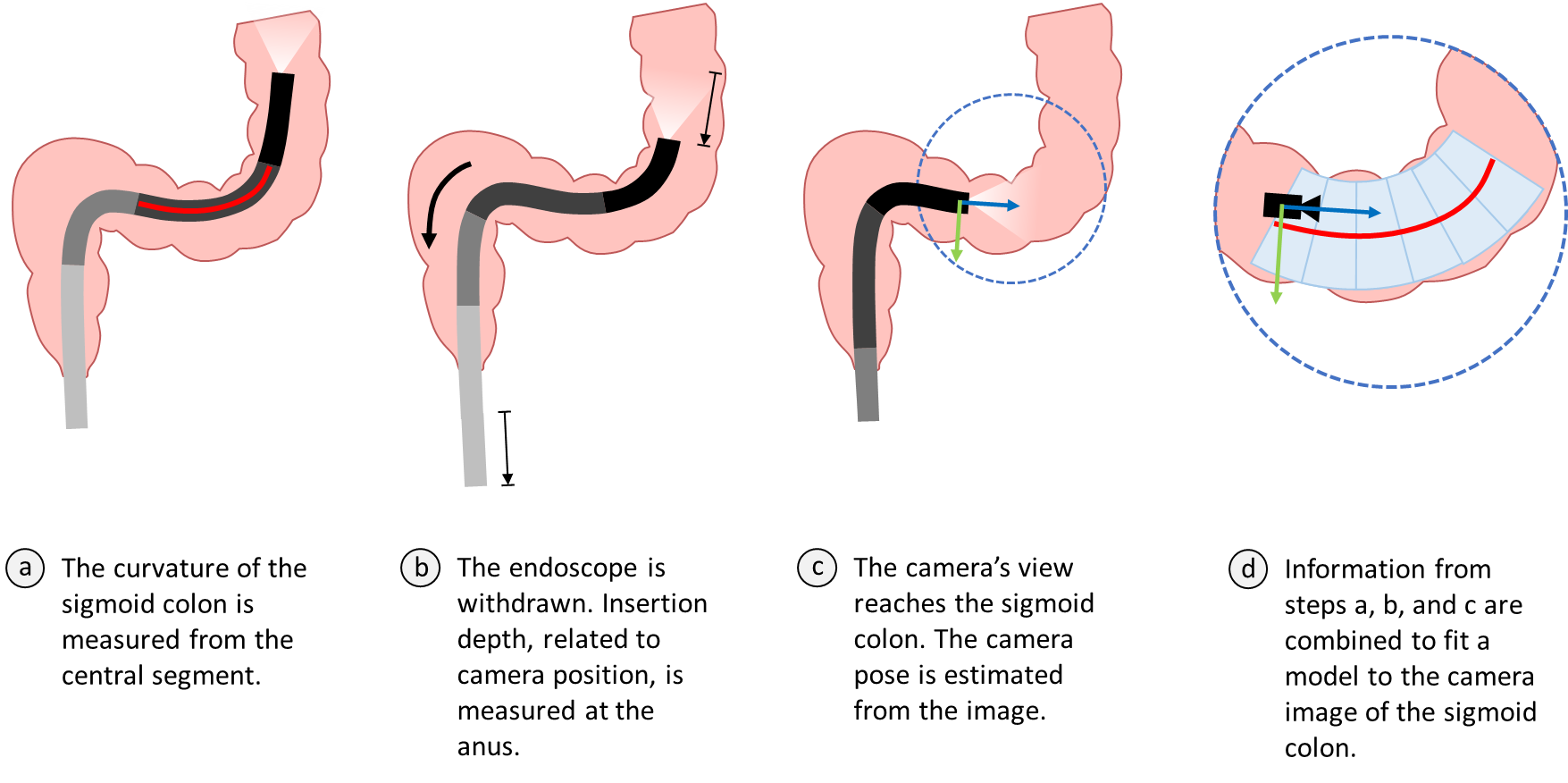
Figure 2. The steps for combining shape sensing, insertion depth and the camera image to fit the colon model.
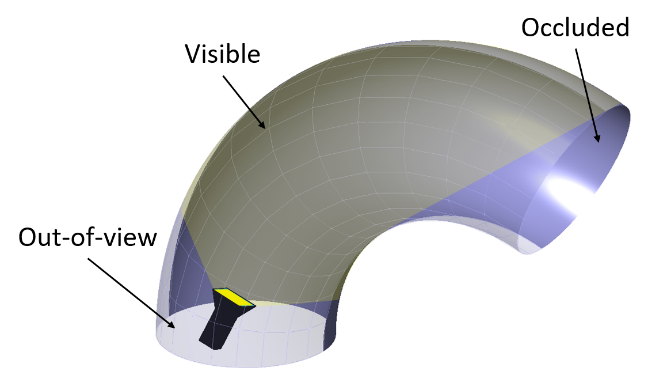
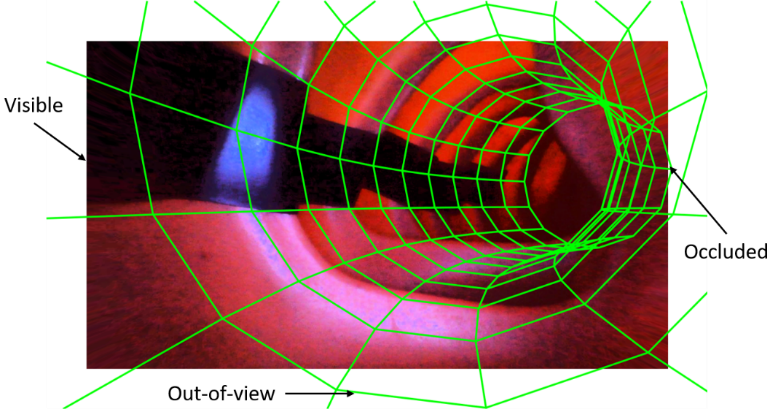
Figure 3. (Left) The 3 areas of missed tissue which the torus model can detect. (Right) Projection of the model onto a medical colon phantom.
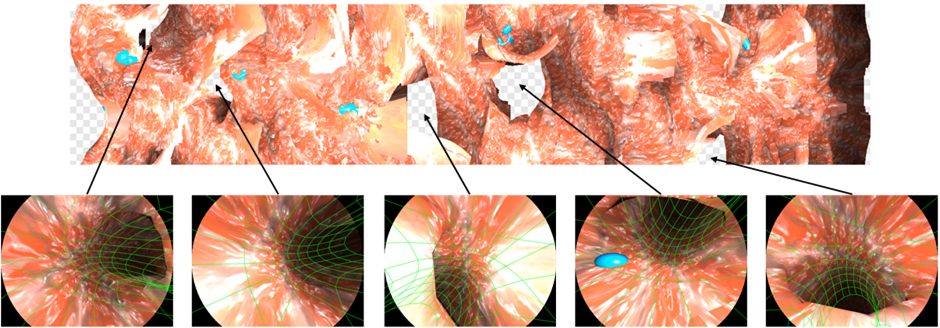
Figure 4. (Top) Panoramic map for 62 cm of simulated colonoscopy. Blindspots are indicated in with a white-grey grid, mucosa in red. (Bottom) Frames corresponding to the detected blindspots, superimposed with the respective curved model for that frame, confirming that the insides of the acute bends were missed.
As some existing colonoscopes already incorporate shape sensing technology, this system can be rapidly integrated into the current clinical workflow. The future of robotic colonoscopes, poised to disrupt the industry, also presents opportunities for additional sensors to be integrated, including shape sensors. Beyond colonoscopy, the system could be applied to endoscopy of any tubular organ, such as the trachea, small intestine, bronchi, urethra, etc.
We have demonstrated, in simulated colonoscopies, that a curved model of the colon can successfully detect blindspots at acute bends over the procedure. At each frame, we detect blindspots with a sensitivity of 82% and a precision of 86%.